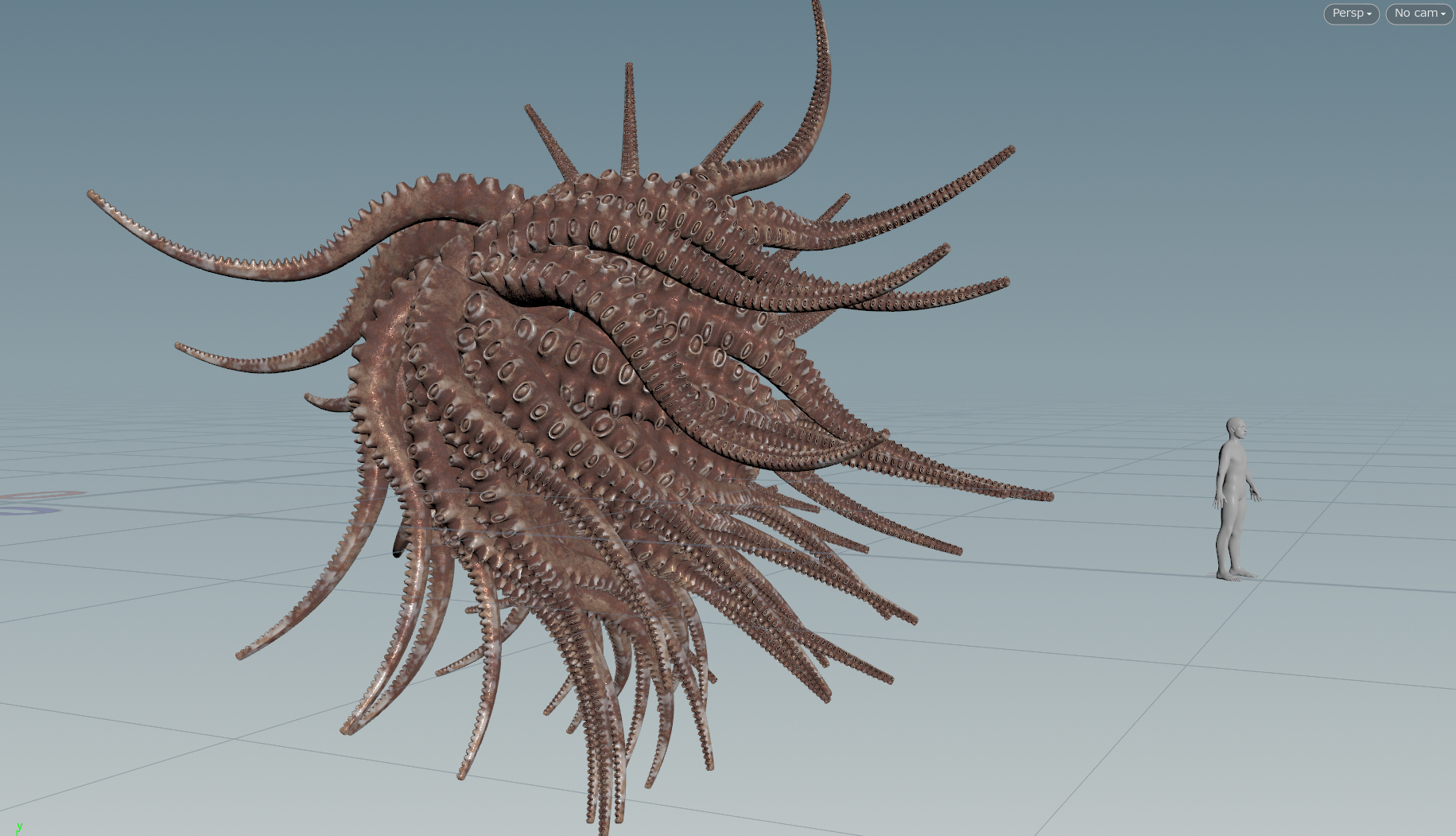
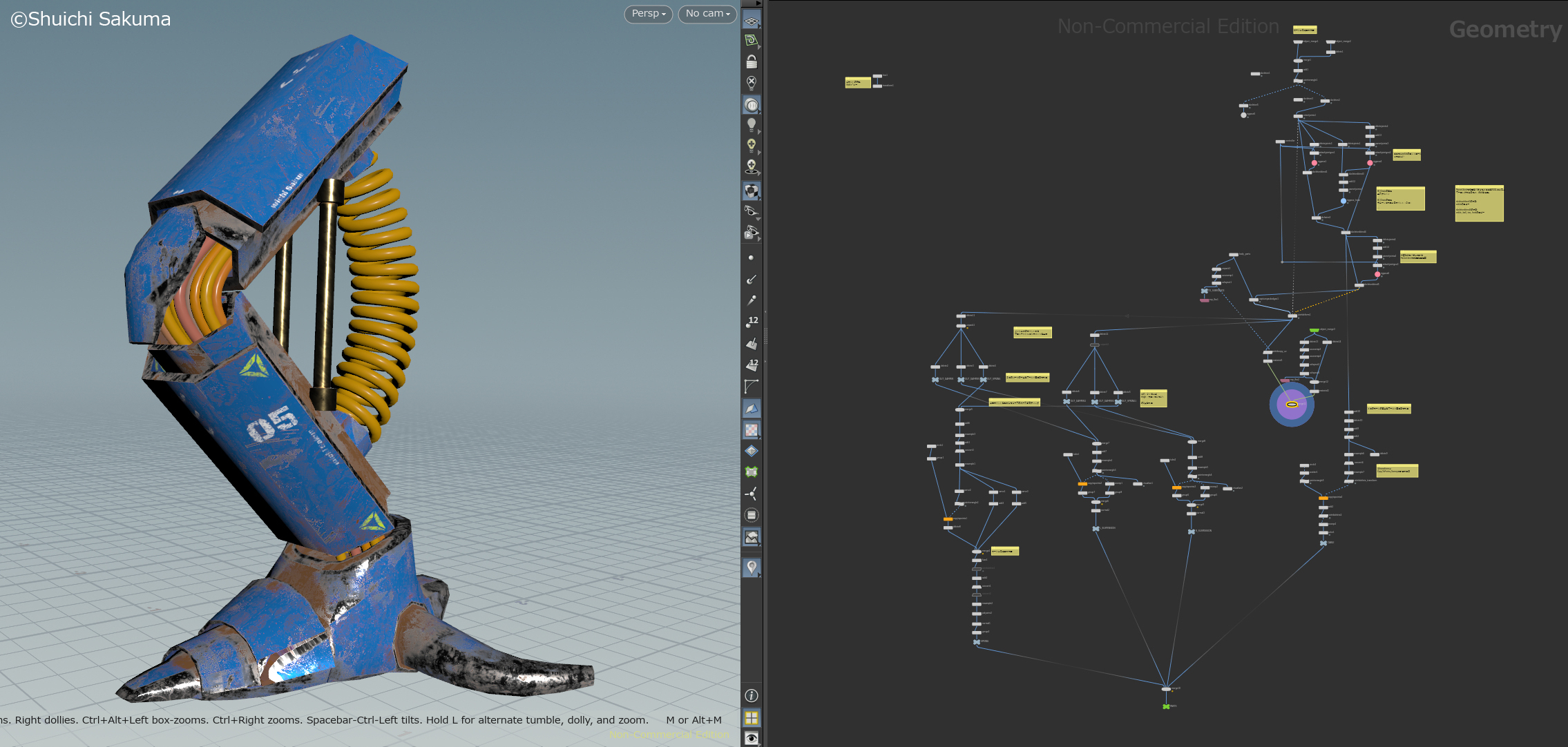
今回、映画「トランスフォーマー3」のあるシーンを参考にして
ヘビ型のロボットを高層ビルに巻き付かせてビルをなぎ倒すシーンを作ってみた。
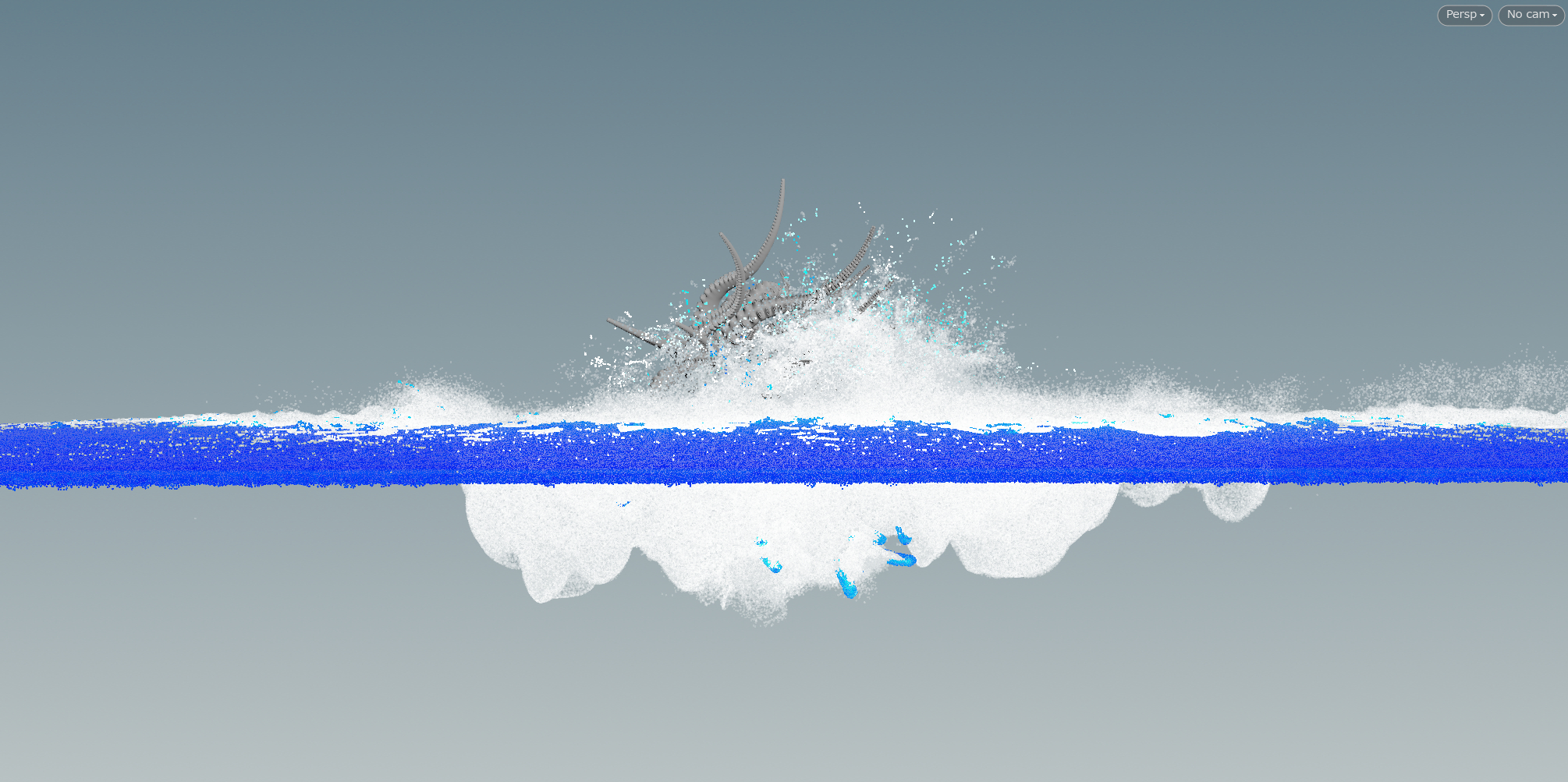
モデリング、アニメーション、シミュレーション、レンダリングはすべてHoudiniで行った。
コンポジットはNuke。
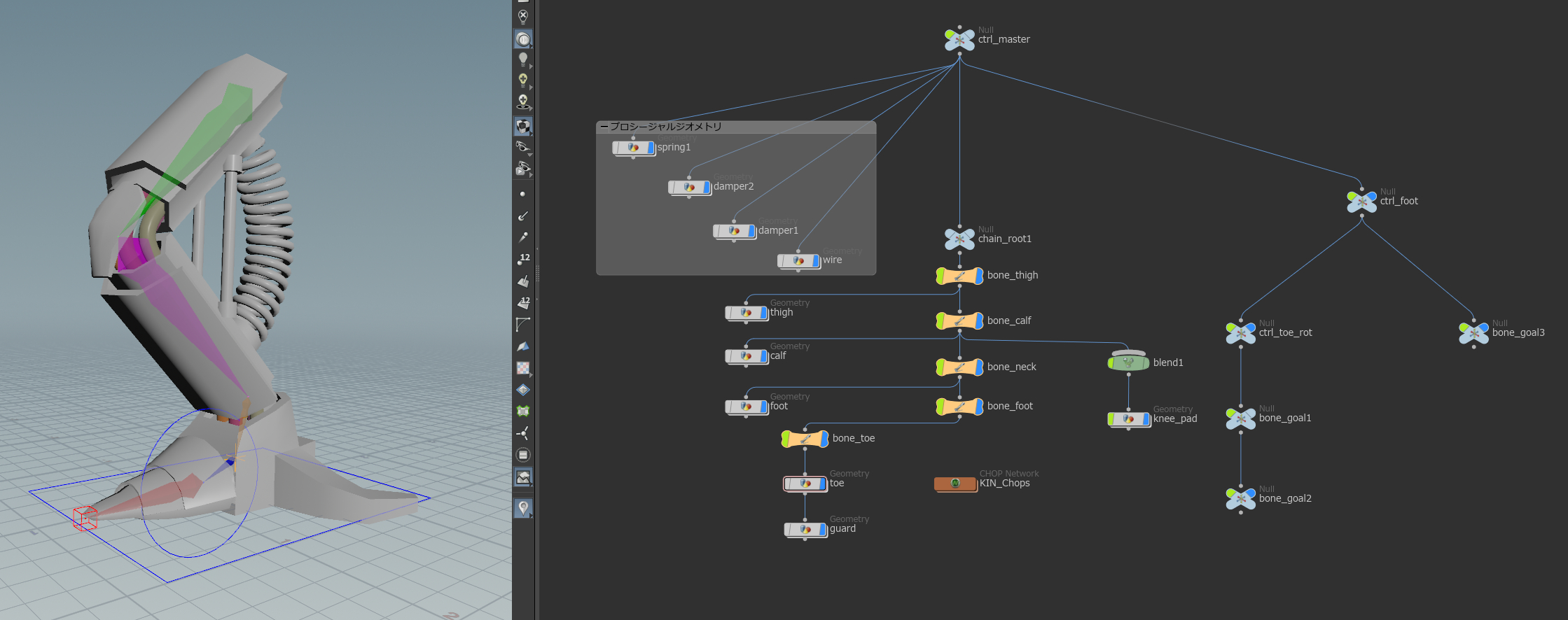
ヘビ型ロボット(劇中では”Driller”という名前)の基本的な動きはVEXでプログラム制御し、
さらにロボットの微震のためにVellumも使用した。
高層ビルのアセットは自分が書いたHoudini本(SOP&VEX編)を見ながら作成した。
今回のシーンはデータサイズが巨大だったため、キャッシュサイズだけでも3T以上となった。
データの規模的には以前作成した水のキャラクターを超えたと思う。
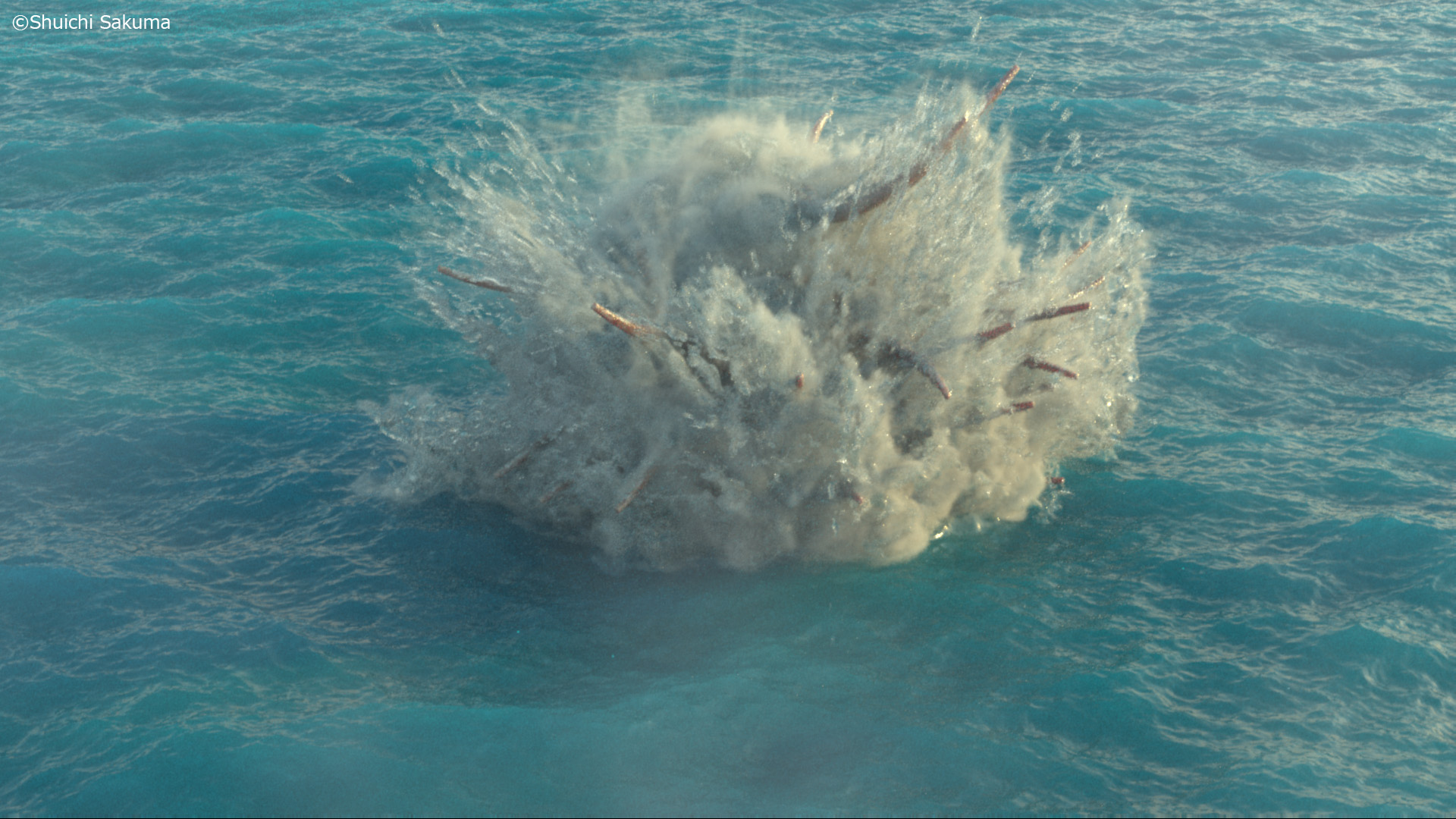
レンダリングはKarma XPUを今回始めて使用。
ベータ版ということで一部未実装な部分はあるが、今回のシーンでは問題なく使用できた。
使用感としては「とにかく速い!」の一言。
Karma XPUは数秒で最終的な絵に近い状態で確認できるため、作業効率の向上につながった。
ただ、レンダリングフレームによってはGPU側のメモリ割り当てのエラーが出て
自動的にCPUのみのレンダリングとなった。
これは使用しているグラボのメモリが8GBしかないため、GPU側のメモリに必要なデータが
全て転送できなかったためだと思われる。

今回はHoudiniのRBD、Vellum、POP、Pyroをフル活用して作ったが、
一昔前に比べてダイナミクス周りは格段に使いやすくなっている印象を受けた。
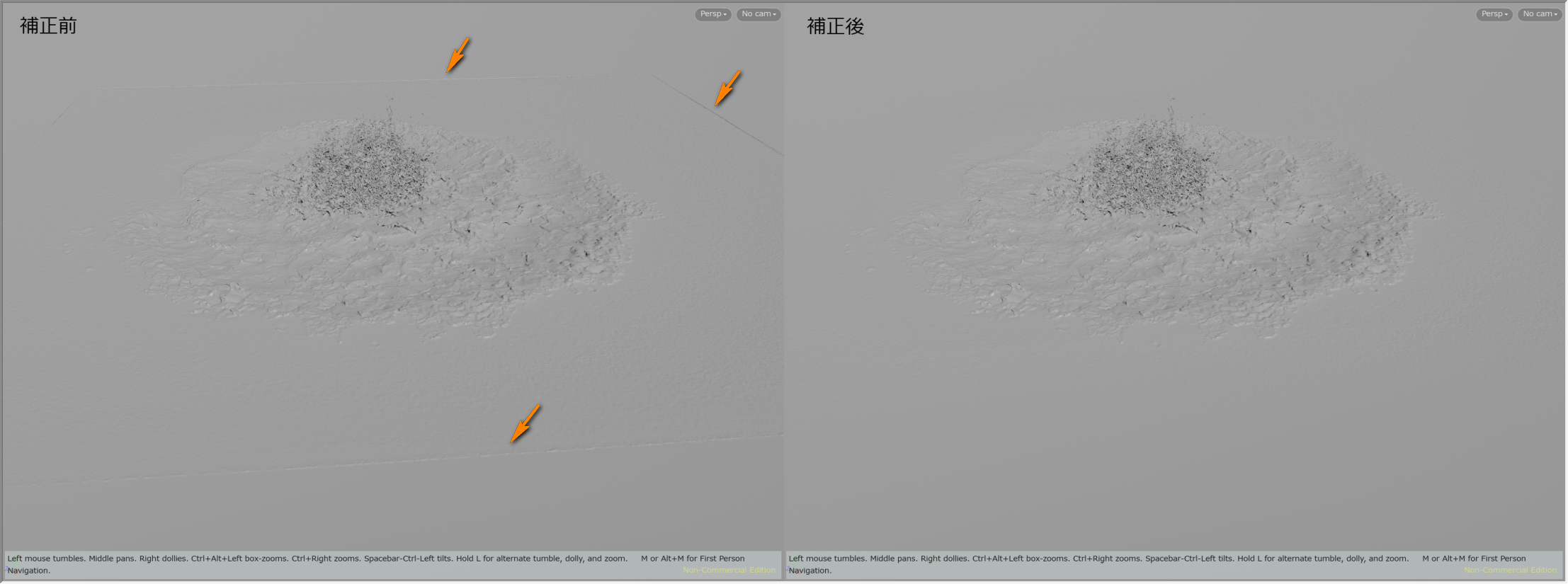
また今回の制作では「いかに壊すか」よりも「いかに壊さないか」に時間を費やした。
(そもそもHoudiniを使えば「壊す」ことは簡単にできるので…)
▼制作環境
CPU : Ryzen Threadripper 3970X(32コア)
GPU : GeForce RTX 3070
メモリ : 128GB
ストレージ : 12TB


ちなみに以下の動画は同じテーマで5年前にチャレンジしたもの。
5年間でそれなりに進歩はしたと思う。