Houdini19でクラウドシミュレーションを行ってみた。
Houdini18.5から追加されたAgent Pose From Rigノードを使用すると
KineFX側(SOP内リグ)からクラウドエージェントのモーションを制御することができる。
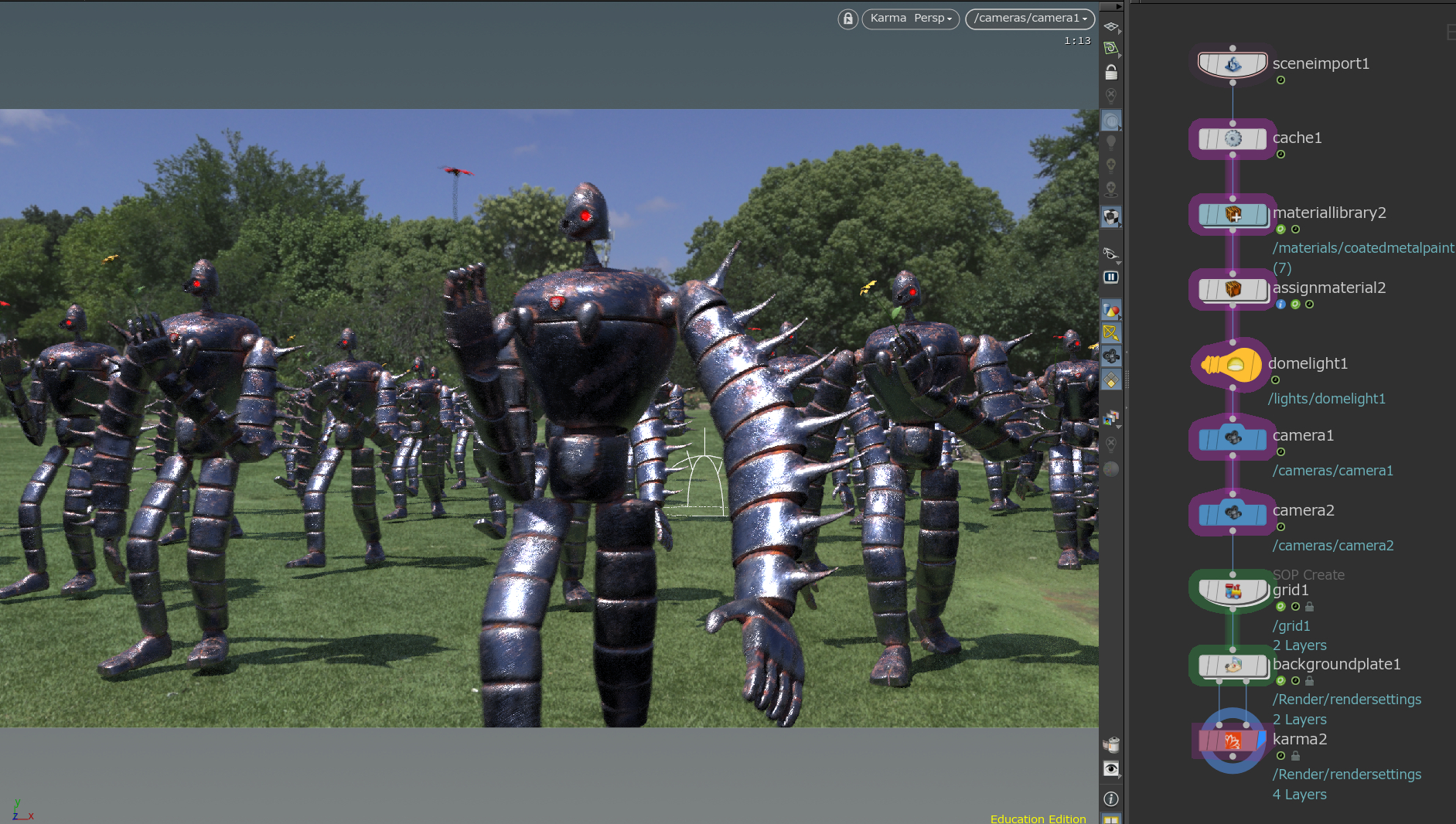
これを使って、クラウドを構成するロボットの40%に対して右手を上げるポース、
同じく40%に対して左手を上げるポーズを追加し、それぞれに赤と黄色の花を持たせてみた。
(残りの20%は両腕を下げた通常の歩きモーションとなっている)
今回Solaris内でKarmaでレンダリングしたが、クラウドのマテリアル設定と
モーションブラー設定で躓いたので、その解決方法を書いておく。
まず、SceneImportノードでは以下の設定をしておく。
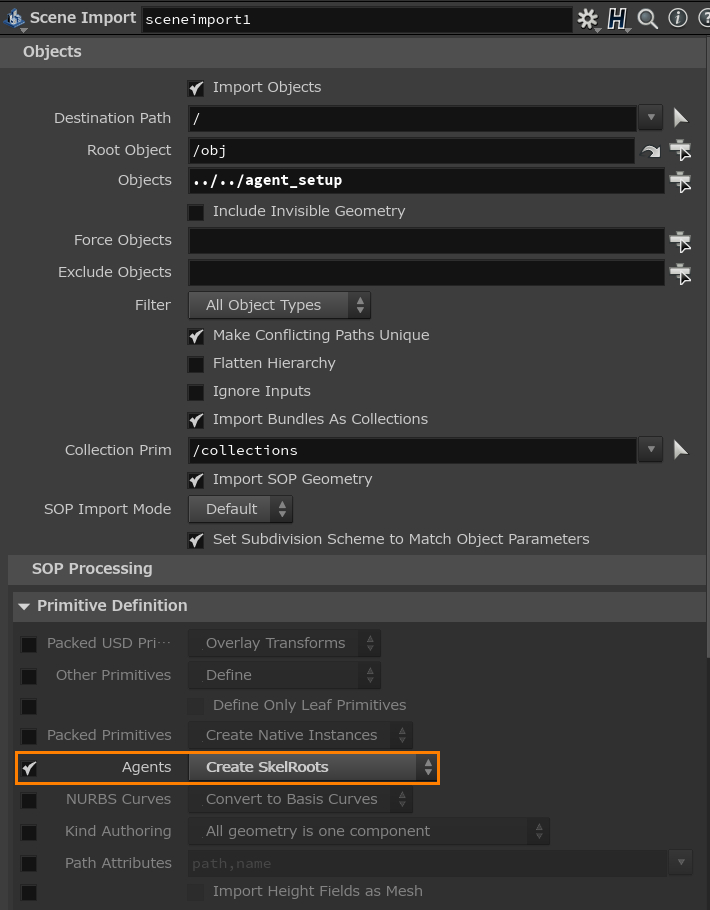
これによって、Assign Materialノードでクラウドを構成するロボットの各パーツに対して
個別のマテリアル設定ができるようになった。
クラウドに限ってはObjectレベルでGeometryノードにVelocityBlurの設定を入れておいても
Karmaではモーションブラーがレンダリングされないため、Cacheノードを作って
LOPネットワークに挿入することで解決した。この方法は以下のスレッドを参考にした。
https://www.sidefx.com/forum/topic/71305/
また、レンダリングではLOP内でHoudini19から追加されたBackground Plateノードを使って
COP内で実写テンプレートと影を合成した。
https://www.sidefx.com/docs/houdini/nodes/lop/backgroundplate.html
Karmaによってビューポート内でモーションブラーや影つきで結果が確認できるようになったが、
快適に作業するためにはそれなりのCPUパワーが必要だと感じた。